Explorer Undersea Remotely Operated Vehicle (ROV)
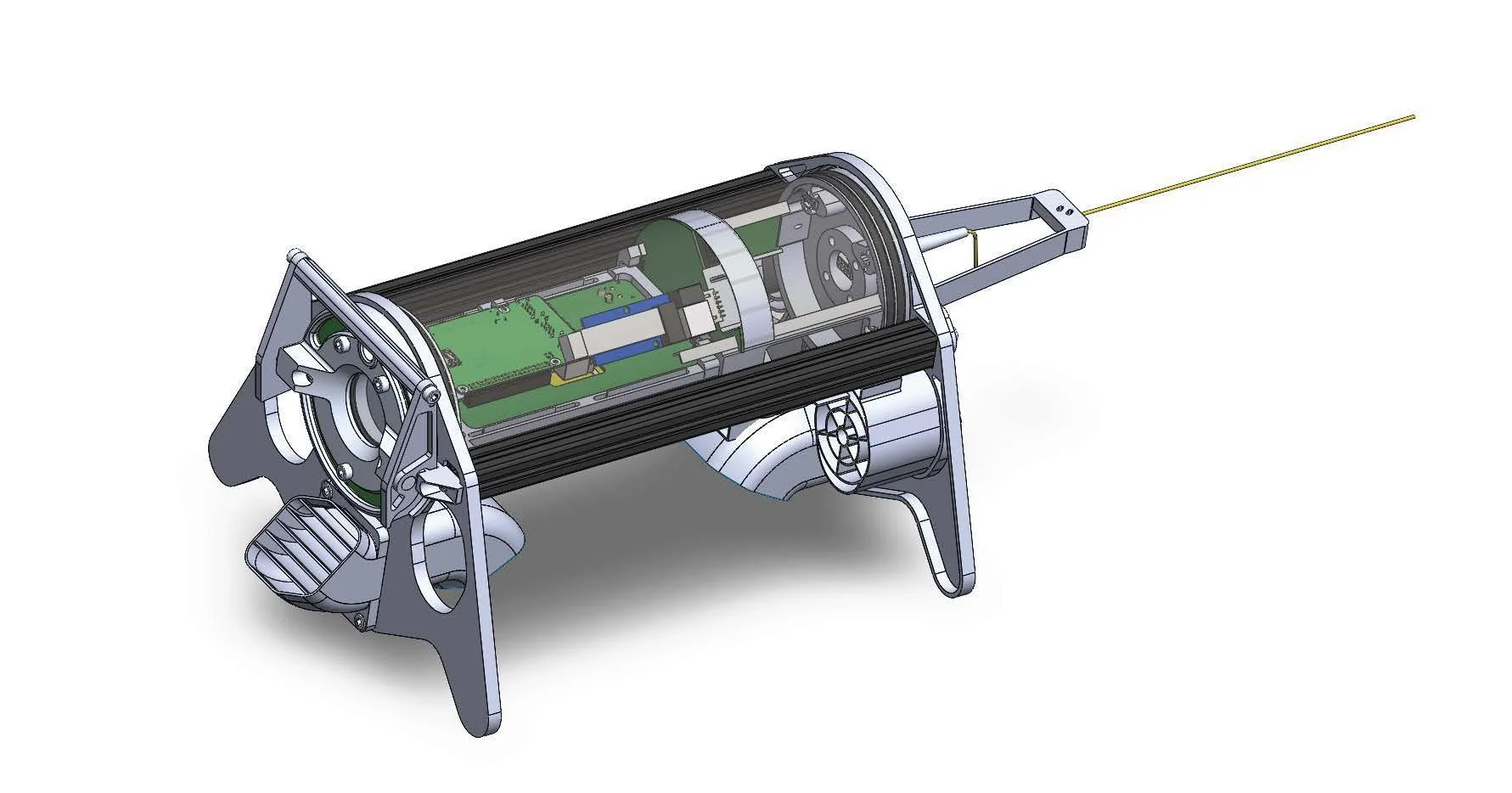
The Explorer undersea Remotely Operated Vehicle (ROV) has surge, yaw, pitch and heave control via joystick from topside through a 150 ft neutrally buoyant fiber-optic tether.
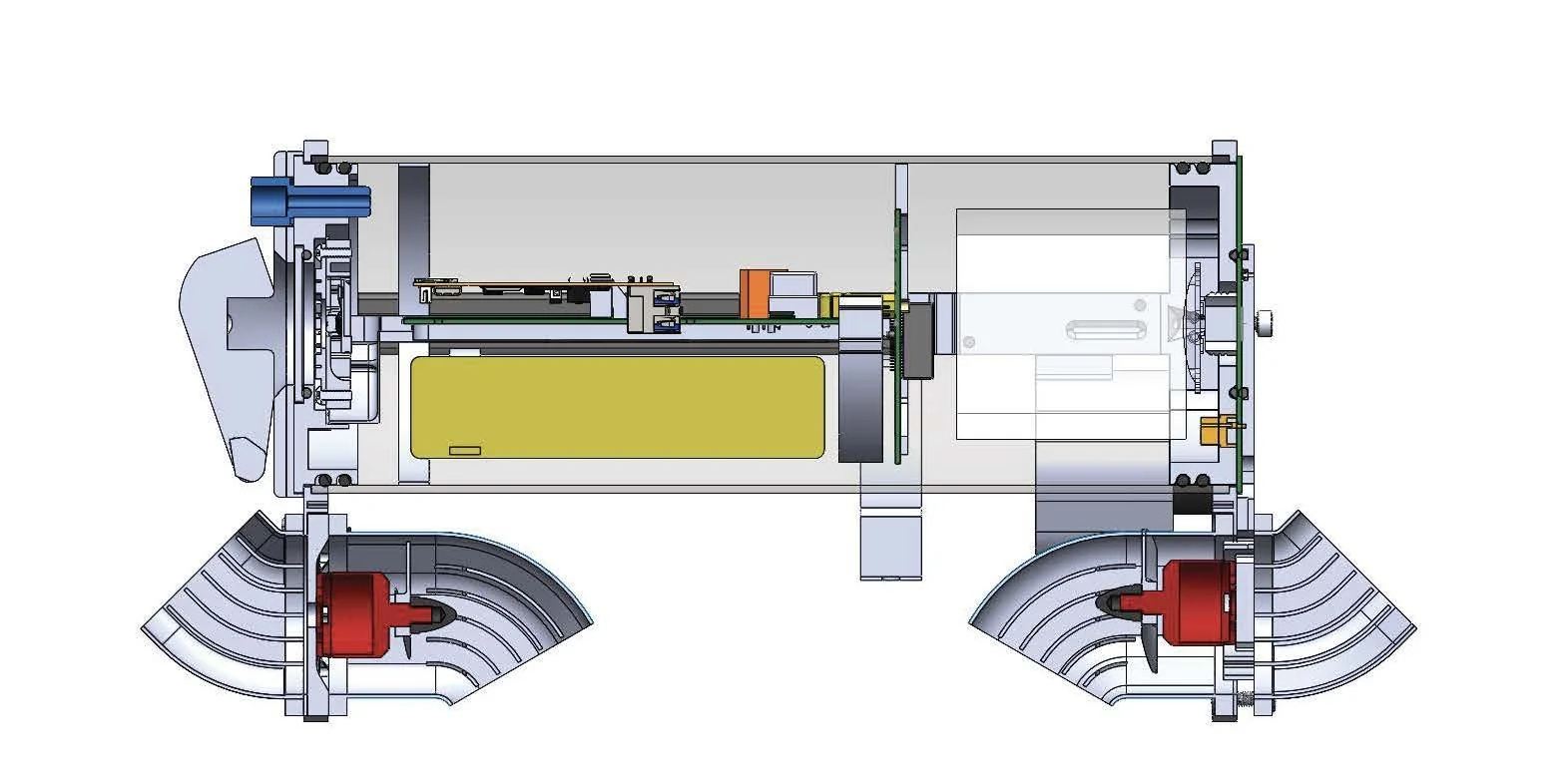
The unique clear acrylic chassis contains a Control Board with Raspberry Pi-4 for ethernet communication, navigation and control and real-time video to to the topside Mac or Windows PC.
The Input/Output Board contains an ESP-32 computer for interface to the IMU, depth, temperature, voltage, leak sensors and neopixel Light Emitting Diodes (LEDs). There are presets for white, blue/green and red lighting.
The Control Board and LiPo battery can be removed without tools, simply rotating the front mounted lever arm.
The four thrusters are driven by Electronic Speed Controllers (ESPs).
We have three sizes of neutrally buoyant ethernet tethers. 6 ft for bench top development, 30 feet for pool and shallow water testing and 150 ft for ocean exploration.
Camera and control are displayed on Windows or Mac computers and is controlled by a Ps3 bluetooth joystick.
Classroom instruction, sensor development, open ocean ROV
An undersea Remotely Operated Vehicle (ROV) with Raspberry Pi-4 and ESP-32 computers, internal camera and external neopixel lights, Control Board, connectorized I/O Board with four Electronic Speed Controllers and Thrusters, 8000 mAh, 16VDCVDC (4-S) Lithium Poly (LiPo) Battery. Connected via 150 ft neutrally buoyant fiber-optic ethernet tether to topside Windows or Mac PC and Ps3 bluetooth joystick.
Clear acrylic frame has easy access to internal components with locking front cover for quick battery change with no screws or tools. Full access to logic board for teaching and troubleshooting.
Two vertical and two horizontal thrusters. Camera is mounted internally and external neopixel LEDs have presets for white/bluegreen and red lighting. Thruster ducting guards for horizontal and vertical thruster safety. Connectorized ethernet tether can be swapped easily from bench, pool and ocean versions.
All vehicles with curriculum and training material on USB thumb drive.
Classroom instruction, sensor development, open ocean, deep-water Remotely Operated Vehicle
Raspberry Pi-4 computer, camera, external lights, servo driver
Two horizontal and two vertical thrusters with Electronic Speed Controllers
150’ neutrally buoyant fiber-optic Ethernet tether to your topside computer.
Ps-3 bluetooth joystick for external maneuver and light control
Explorer ROV Outline
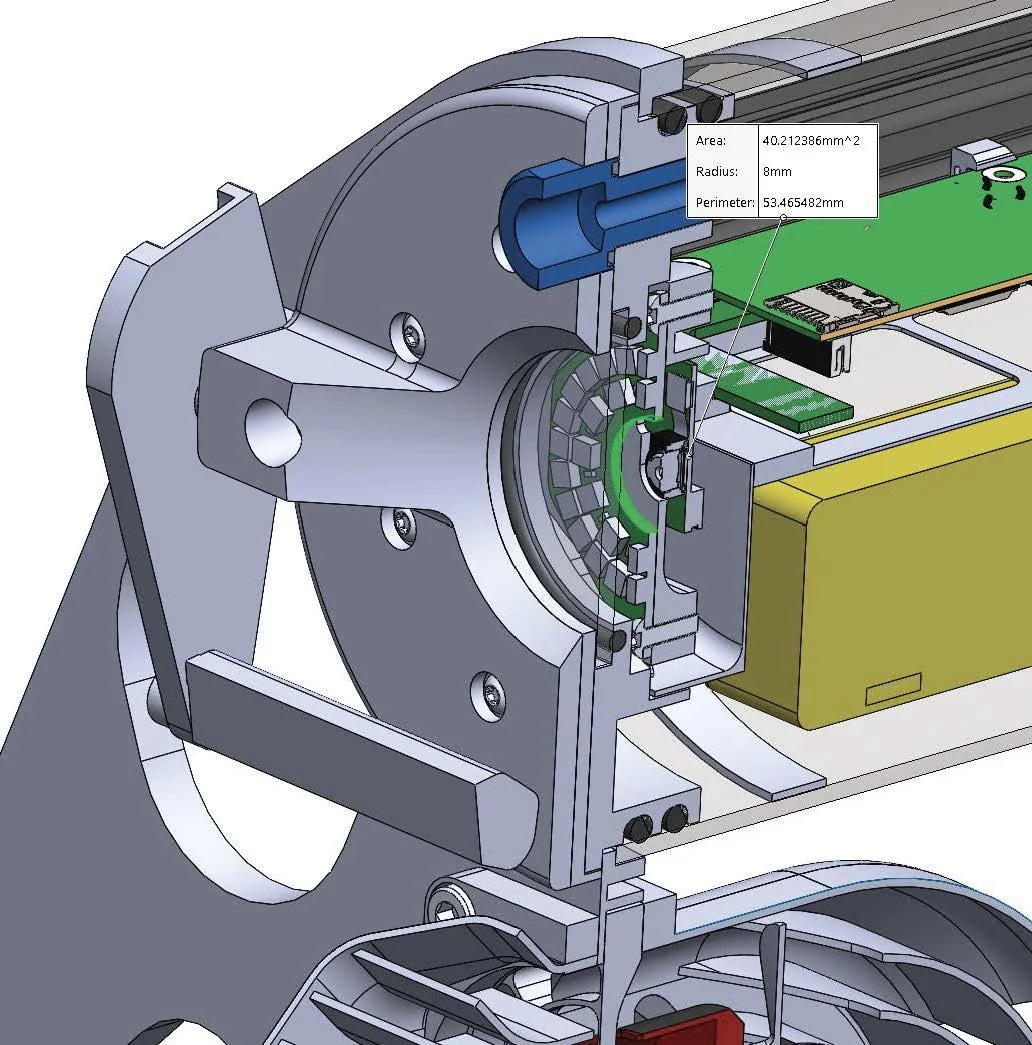
Explorer ROV Front End



Vacuum Pump Assembly consists of a Single Stage Vacuum Pump 1/4 HP with all gages and fittings required for the Explorer ROV evacuation and seal check.